- Nuten, Wicklungen, Stator, Motorklemmbrett
- standardmäßig 3 Wicklungen jeweils um 120° versetzt
- Läufer (Stator), Welle, Stäbe wie in einem Käfig angeordnet, Lagerschilder, Lüfterrad => oberflächenmäßige Lüftung
- Aluminiumstäbe (elektr. miteinander verbunden), die unterschiedlichen Formen bewirken die unterschiedlichen Charakteristika eines Motors
- bei guter Wartung und Behandlung kann ein Drehstrommotor ein Leben lang halten
- Reinigung + Überprüfung, Lüfter immer sauber halten (s. Gitter)
- die Kugel-, Walz-, Tonnen- und Nagellager verschleißen nach der Zeit (Maschinenbücher für Reparaturservice, z.B. halbjährlich, jährlich oder alle 2-4 Jahre)
- Cave: lose nach radial oder axial
- Motor schützen gegen Überlastung

- jeder Elektromotor ist ein Stromerzwinger => wir geben nur eine Spannung drauf, den Rest holt er sich aus dem Netz
- d.h. er holt sich für den Belastungsfall seinen "Magnetisierungsstrom" aus dem Stromnetz (=eigenständiger Regler)
- ein Motor im Leerlauf macht keinen Sinn => Blindstrom hoch, Energieverschwendung
- Leistungsschild, Schutzart, Schutzklasse, Form, Frequenz, Drehmoment, Isolationsklasse, Kipp-, Dreh-, Sattel- und Nennmoment
- Belastung sehr hoch => Wicklungen können verbrennen
- Bimetallrelais (ind. Überwachung + Regeln)
- Motorschutzschalter (elektromechanische und thermische Auslösung)
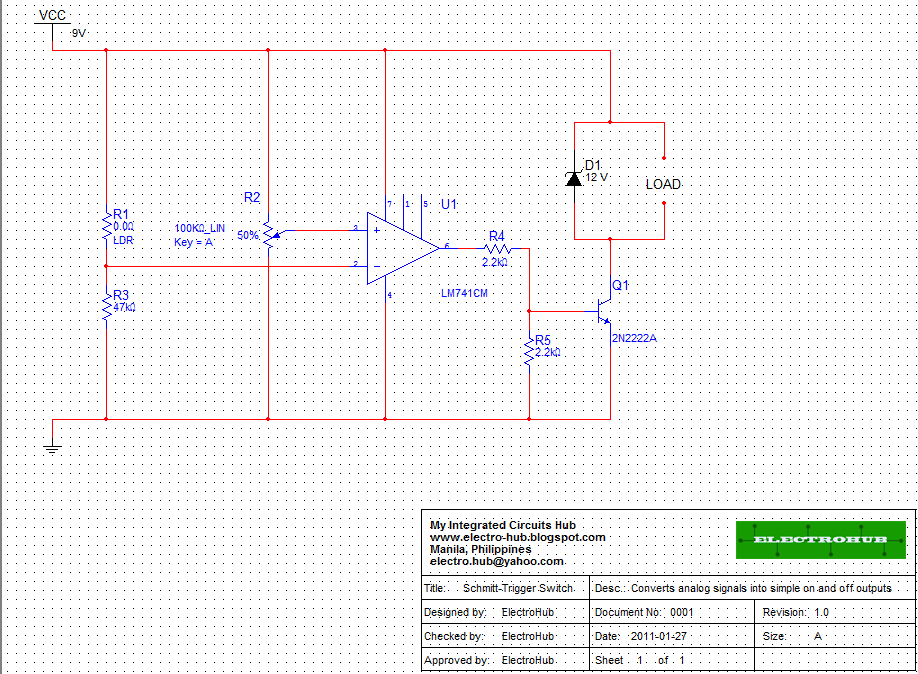
- Steuergerät mit Schmitt-Trigger
Zeichnung 1:
einfache Steuerelektronik für Schmitt-Trigger
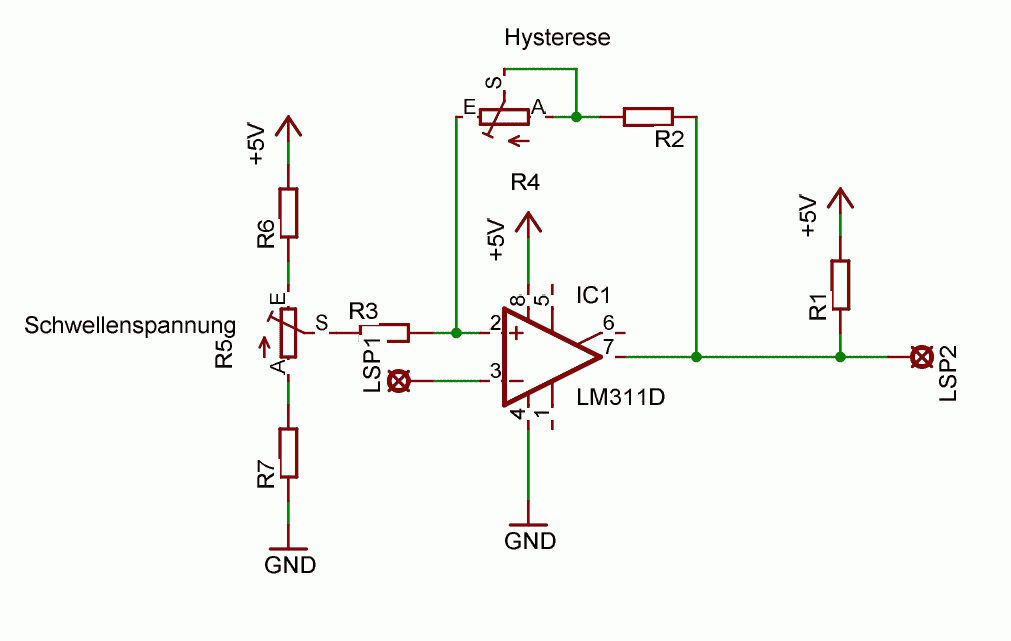
Zeichnung 2:
Schmitttrigger, Hystereskurve
Experiment 1:
- Schmitt-Trigger-Funktion an einem Experementierwandkasten demonstriert
- kleiner Baukasten mit LM 741, vorgeschalteter Fotodiode, Thermistor oder einem Poti; + einfaches Schaltbild (Poti am Eingang, E/A Spannungsmessung)
Zeichnung 2: Stromfließrichtung und Magnetfeld
da wo Strom eintritt = Südpol

da wo Strom austritt = Nordpol

Magnetfeld ist immer in sich geschlossen
- durch die drei Spulen entsteht ein drehbares, bewegtes Magnetfeld
- Spannung wird induziert, Strom kann im geschlossenen (!) Stator fließen, es entsteht ein geschlossener Stromkreis (Spannung nicht ohne weiteres messbar aber errechenbar) + zweites Magnetfeld
- asychron = Stator bewegt sich immer langsamer als das sich drehende, äußere Magnetfeld
- Synchrondrehzahl = (f*60) / n Polpaare = 50 *60 / 1
Man kann auch eine normale Metalldose auf einer Welle gelagert in dem nicht sichtbaren Magnetfeld sich drehen lassen.
Spannungsinduktion wird ermöglicht durch:
- ein Magnetisches Feld + Drehbewegung + Bewegungsunterschied
- Magnetischer Fluss = Tesla * Länge * ...
Läufer ist immer langsamer als das Drehfeld => Schlupf (S)
Bei allen D-Motoren liegt der Schlupf bei ca. 2-8 % => schlupfgesteuerte Maschinen
Tabelle für f=50Hz
Anzahl Pole / Poopaare / n(s) in U *min^-1 / n(L) Rotator / s in U *min^-1 / s(%)
2 / 1 / 3.000 / 2850 / 150 / 5
4 / 2 / 1.500 / 1480 / 20 / 1,33
6 / 3 / 1.000 / 960 / 40 / 4
8 / 4 / 750 / 725 / 25 / 3,3
10 / 5 / 600 / 580 / 20 /
mit der Umdrehung / Drehung wird die Induktion erzeugt (Segen der Wechselspannung ;-)
* * *Bei allen D-Motoren liegt der Schlupf bei ca. 2-8 % => schlupfgesteuerte Maschinen
Tabelle für f=50Hz
Anzahl Pole / Poopaare / n(s) in U *min^-1 / n(L) Rotator / s in U *min^-1 / s(%)
2 / 1 / 3.000 / 2850 / 150 / 5
4 / 2 / 1.500 / 1480 / 20 / 1,33
6 / 3 / 1.000 / 960 / 40 / 4
8 / 4 / 750 / 725 / 25 / 3,3
10 / 5 / 600 / 580 / 20 /
mit der Umdrehung / Drehung wird die Induktion erzeugt (Segen der Wechselspannung ;-)
- auf dem E-Motor-Leistungsschild steht immer n(L).
- Im Moment des Einschaltens ist der Schlupf 100 %, danach sinkt er auf ca. 2-8 % wenn der Motor die Nenndrehzahl erreicht hat. So nimmt auch die Frequen im Läufer nimmt ab !
Keine Kommentare:
Kommentar veröffentlichen