230V Elektromotor an 400V
Notizen, Unterricht:
- ein elektrischer Motor ist ein Stromerzwinger
- werden ein oder mehrere Motoren mit größerer Leistung an das Netz angeschlossen, kann es passieren, dass im Anlaufmoment ein so großer Strom gezogen wird, der das Netz in die Knie zwingt.
Lösungen:
1. Option
- Stern-Dreieck-Schaltung
ist das Mittel der Wahl
soll im Unterricht von den Azubis in Logo erstellt werden
- Frequenzumformer
die eingespeiste Frequenz kann sowohl verkleinert als auch vergrößert werden2. Option
- Kusa-Schaltung
Kurzschluss-Sanftanlauf
- in einem Strang wird ein Widerstand + paralleler Schließer eingebaut
- Schleifringläufermotor
- teure Variante, fällt immer mehr aus der industriellen Anwendung aus
- Anlauftransformator
wurde früher verwendet
Asynchronmotor / Drehrichtungsänderung
Zitat:
- Zur Umkehr der Drehrichtung werden zwei Phasen, z.B. 2+3 an den Motorklemmen U1-V1-W1 vertauscht angeschlossen.
- Es ist als grün-gelb an das Gehäuse angeschlossen.
- K1 und K2 sind Schalter, F 1 bis 4 Sicherungen.
Asynchronmotor

Motor wird einmal manuell und zum anderen automatisch von Stern- auf Dreieck geschaltet
- charakteristisch ist der veränderte Ton: von leise nach lauter (im Anlauf bringt der Motor 1/3 seiner Leistung)
- Linkslauf => Anlauf im Sternbetrieb => Umschalten nach Dreiecksbetrieb => Stop => Rechtslauf => Anlauf im Sternbetrieb => Umschalten nach Dreiecksbetrieb
- hier kann man also nicht direkt von Links- auf Rechtslauf den Motor drehen lassen, er muss bei Richtungswechsel wieder in den Anfangszustand zurückgesetzt werden.
- Phasen werden nicht ordentlich gesteckt => Überlastung => Motor blockiert
- Motor wird mit einer Magnetbremse im Dreiecksbetrieb bis zu 6 Nm "belastet"
- mit der gleichen Last kann im Sternbetrieb der Motor nicht arbeiten => er blockiert
Schleifringläufermotor = hohes Anzugsmoment
4. Versuch:
Schleifringläufer (9 Anschlüsse anstatt 6) wird über Widerstandsgruppe angeschlossen
- a) Widerstandswerte werden erniedrigt => Frequenz nimmt zu
- b) Last wird erhöht, Drehzahl nimmt ab, aber das Drehmoment bleibt konstant
Schaltbild für Schleifringläufermotor für Schaltwalzenanlasser

esmmars.de
Notiz:
- Widerstandsnetzwerk,
- die drei Widerstände sind "sternförmig" miteinander verbunden,
- die unterschiedlichen "Widerstandsstellungen" können auch mit Schützen realisiert bzw. abgegriffen werden
Antriebstechnik
entnommen aus:
Zitat:
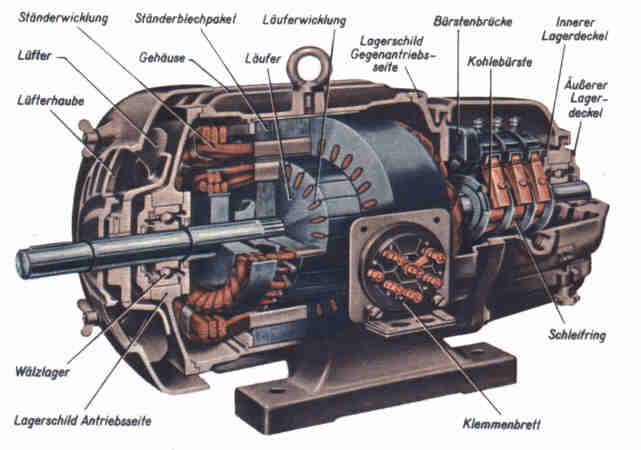
Asynchronmotoren sind die am meisten eingesetzten Motoren für Maschinen.
- Diese Motoren haben drei Ständerwicklungen, die räumlich um 120C° versetzt angeordnet sind.
- Dieses Drehfeld induziert in der Läuferwicklung eine Spannung.
- Das entstehende Wechselfeld des Läufers versucht dem Drehfeld nachzueilen, erreicht aber nie dessen Drehzahl.
Käfiganker und Rotorring

- In den Nuten sind Alu-Stäbe mit unterschiedlicher Formgebung eingebettet, die an den Stirnseiten mit Alu-Ringen verbunden sind.
- Diese Stäbe ersetzen die klassische Läuferwicklung.
- Rundstabläufer,
- Hochstabläufer
- Doppelstabläufer.
Die Charakteristik eines Automobil-Elektromotors
ist eine völlig andere, als die eines Ottomotors.

Zitat:
Elektromotoren, die zum Antrieb von Elektroautos verwendet werden, geben bei niedrigen Drehzahlen das höchste Drehmoment ab, das aber nach Erreichen der höchsten Leistung kontinuierlich abfällt.
- Daher benötigt ein solchermaßen ausgestattetes Elektroauto keine Kupplung und das Getriebe muß lediglich die Vorwärts- und Rückwärtsbewegung bestimmen können.
Ein Nachteil beim Asynchronmotor besteht darin, daß bei Stillstand und niedriger Drehzahl der Ständerstrom extrem ansteigt (6 - 8facher Nennstrom).
- Dadurch wird das Leitungsnetz stark beansprucht, so dass die Leitungsschutzeinrichtungen öfter auslösen.
- Außerdem ist das bestehende Anlaufmoment für viele Anwendungen zu hoch, was vielfach zu mechanischen Zerstörungen fährt.
(s.a. im Schiffsverkehr => Schiffsschraube => bei voller Fahrt stoppen (Seemanöver:) + Rückwärtsfahrt)

Zitat:
Den Motor interessiert nur was aus dem Controller kommt.
- Aus der Differenz zwischen induzierter Spannung und der Spannung des Controllers an die Motorphasen ergibt sich dann der Drehmoment bildende Strom.
- Das heißt bei einer festen Drehzahl ist das Drehmoment proportional zur Spannung.
Die Wirkungsgradbereiche sind hier sehr schön dargestellt.

weiter:
Um diese extremen Zustände zu vermeiden, setzt man Anlaufschaltungen ein.
- Die Anlaufschaltungen basieren alle auf dem Prinzip der Spannungssteuerung.
- Diese Grobabstufung ist aber zumeist unzureichend.
- Mit der Anfangsspannung kann aufgrund der quadratischen Abhängigkeit des Drehmoments von der Spannung das minimal notwendige Anfangsdrehmoment eingestellt werden.
Die korrekte Einstellung des Anfangsmomentes stellt einen wesentlichen Punkt für den optimalen und zuverlässigen Betrieb eines sanftanlaufenden Motors dar.
Asynchronmotor = dreht sich nicht synchron mit der Netzfrequenz

Es gibt zwei wesentliche Belastungsfälle:
- Beschleunigung träger Massen, wie beim Einsatz von Ventilatoren, ebener Förderbänder oder Schleifscheiben.
- Hierbei verläuft die Drehmomentenkurve beginnend von quasi Null quadratisch über die Drehzahl bis zum Nennmoment der Maschine.
- Die Anfangsspannung kann bei Null beginnen.
- Der Motor beginnt sich fast sofort zu drehen und der Stromverlauf ist kontinuierlich.
- Eine höhere Anfangsspannung für diese Anwendung verursacht wieder einen Momenten- und Stromsprung.
Lastenkennlinie, Betriebspunkt, Senkung der Betriebsspannung

- Antrieb von Maschinen mit festem (!) Anfangsdrehmoment wie z. B. Säge-, Knet- oder Zerkleinerungsmaschinen.
- In diesen Fällen beginnt die Drehmomentkurve nicht bei Null.
- Die einzustellende Anfangsspannung sollte mindestens so hoch gewählt werden, dass das Festmoment der Maschine gerade überwunden wird und der Motor ebenfalls gleich anläuft.
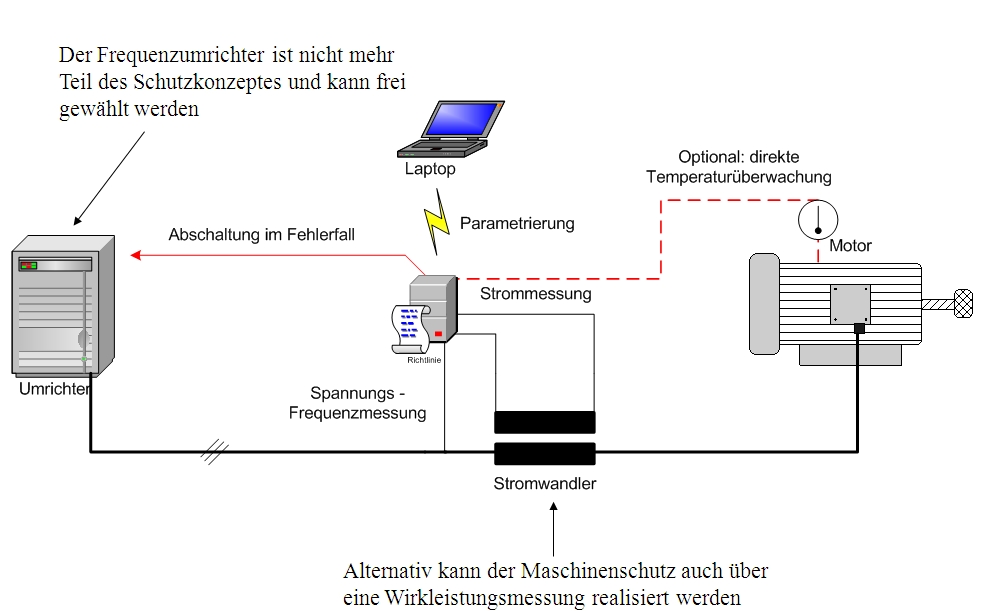
Flussabsenkung bei Frequenzumrichterbetrieb

- Thyristor => Gleichstrom
- Triac => Wechselstrom
. . .

Keine Kommentare:
Kommentar veröffentlichen